E6A2-CS3E 60P/R 2M
Incremental 25-mm-dia. Rotary Encoder
Image
Rotary Encoder, Incremental, External Diameter: 25 dia., Voltage output, 60 P/R, 5 to 12 VDC, Phases A, Pre-wired model, 2 m
| Encoding method |
Incremental Shaft model |
|---|---|
| Resolution |
60 P/R |
| Output phases |
A |
| Control output |
Voltage output |
| Connection method |
Pre-wired models (Cable length: 2 m) |
- Ratings / Performance
As of July 25, 2024
| Categorise | Incremental Shaft model | |
|---|---|---|
| Diameter | 25 mm dia. | |
| Power supply voltage | 5 to 12 VDC (-5% to +10%) Ripple (p-p) 5% max. | |
| Current consumption | 30 mA max. | |
| Resolution | 60 P/R | |
| Inrush current | Approx. 9 A (0.3 ms) | |
| Output phases | A | |
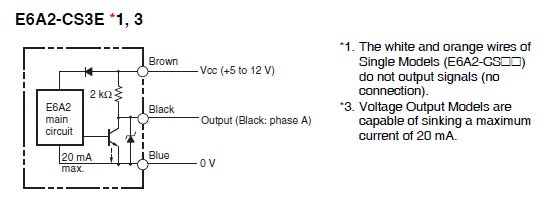
| Control output | Output type | Voltage output | Output resistance | 2 kΩ | Load current | 20 mA max. | Residual voltage | 0.4 V max. (Load current: at 20 mA max.) |
| Max. response frequency | 30 kHz | |
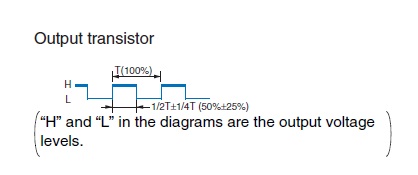
| Output duty factor | 50±25% | |
| Starting torque | 1 mN.m max. | |
| Moment of inertia | 1 x 10-7 kg.m2 max. | |
| Shaft loading | Radial: 10 N Thrust: 5 N | |
| Max. permissible rotation | 5000 r/min | |
| Ambient temperature | Operating: -10 to 55 ℃ (with no icing) Storage: -25 to 80 ℃ (with no icing) | |
| Ambient humidity | Operating: 35 to 85 % (with no condensation) Storage: 35 to 85 % (with no condensation) | |
| Insulation resistance | Between charged parts and the case: 20 MΩ or higher (500 VDC megger) | |
| Dielectric strength | Between charged parts and the case: 500 VAC 50/60 Hz 1 min | |
| Vibration resistance | Destruction: 10 to 55 Hz, 1.5 mm double amplitude each in X, Y, and Z directions for 2 h | |
| Shock resistance | Destruction: 500 m/s2 for 3 times each in X, Y, and Z directions | |
| Degree of protection | IEC: IP50 | |
| Connection method | Pre-wired models (Cable length: 2 m) | |
| Material | Case: Aluminum alloy Main Unit: Aluminum Shaft: SUS420J2 Mounting Bracket: Iron zinc plating | |
| Accessories | Instruction manual, Couplings, Hex-head spanner | |
As of July 25, 2024
- Dimensions
As of July 25, 2024
As of July 25, 2024
- Output circuit diagram
As of July 25, 2024
As of July 25, 2024
- Connected specification chart
As of July 25, 2024
As of July 25, 2024
- Timing chart
As of July 25, 2024
As of July 25, 2024

© Copyright OMRON Corporation 2007 - 2021. All Rights Reserved.